



4. ໜ້າທີ່ຊອບແວຫຼັກຂອງ BMS
l ຟັງຊັນການວັດແທກ
(1) ການວັດແທກຂໍ້ມູນພື້ນຖານ: ການຕິດຕາມແຮງດັນໄຟຟ້າຂອງແບັດເຕີຣີ, ສັນຍານກະແສໄຟຟ້າ, ແລະອຸນຫະພູມຂອງແບັດເຕີຣີ. ໜ້າທີ່ພື້ນຖານທີ່ສຸດຂອງລະບົບການຈັດການແບັດເຕີຣີແມ່ນການວັດແທກແຮງດັນໄຟຟ້າ, ກະແສໄຟຟ້າ, ແລະອຸນຫະພູມຂອງເຊວແບັດເຕີຣີ, ເຊິ່ງເປັນພື້ນຖານຂອງການຄິດໄລ່ລະດັບສູງສຸດ ແລະເຫດຜົນການຄວບຄຸມທັງໝົດຂອງລະບົບການຈັດການແບັດເຕີຣີ.
(2) ການກວດຈັບຄວາມຕ້ານທານຂອງການສນວນ: ລະບົບແບັດເຕີຣີທັງໝົດ ແລະ ລະບົບແຮງດັນສູງ ຕ້ອງໄດ້ຮັບການທົດສອບການສນວນໂດຍລະບົບການຈັດການແບັດເຕີຣີ.
(3) ການກວດຈັບການເຊື່ອມຕໍ່ແຮງດັນສູງ (HVIL): ໃຊ້ເພື່ອຢືນຢັນຄວາມສົມບູນຂອງລະບົບແຮງດັນສູງທັງໝົດ. ເມື່ອຄວາມສົມບູນຂອງວົງຈອນລະບົບແຮງດັນສູງເສຍຫາຍ, ມາດຕະການຄວາມປອດໄພຈະຖືກເປີດໃຊ້ງານ.
ລຟັງຊັນການຄາດຄະເນ
(1) ການປະເມີນ SOC ແລະ SOH: ສ່ວນຫຼັກ ແລະ ສ່ວນທີ່ຍາກທີ່ສຸດ
(2) ການດຸ່ນດ່ຽງ: ປັບຄວາມບໍ່ສົມດຸນຂອງຄວາມຈຸ SOC x ລະຫວ່າງໂມໂນເມີຜ່ານວົງຈອນດຸ່ນດ່ຽງ.
(3) ຂໍ້ຈຳກັດພະລັງງານແບັດເຕີຣີ: ພະລັງງານເຂົ້າ ແລະ ພະລັງງານອອກຂອງແບັດເຕີຣີແມ່ນຖືກຈຳກັດຢູ່ທີ່ອຸນຫະພູມ SOC ທີ່ແຕກຕ່າງກັນ.
ລໜ້າທີ່ອື່ນໆ
(1) ການຄວບຄຸມຣີເລ: ລວມທັງຫຼັກ +, ຫຼັກ-, ຣີເລສາກໄຟ +, ຣີເລສາກໄຟ -, ຣີເລກ່ອນສາກໄຟ
(2) ການຄວບຄຸມຄວາມຮ້ອນ
(3) ໜ້າທີ່ການສື່ສານ
(4) ການວິນິດໄສຄວາມຜິດ ແລະ ສັນຍານເຕືອນໄພ
(5) ການດໍາເນີນງານທີ່ທົນທານຕໍ່ຄວາມຜິດພາດ
5.ໜ້າທີ່ຊອບແວຫຼັກຂອງ BMS
ລຟັງຊັນການວັດແທກ
(1) ການວັດແທກຂໍ້ມູນພື້ນຖານ: ການຕິດຕາມແຮງດັນໄຟຟ້າຂອງແບັດເຕີຣີ, ສັນຍານກະແສໄຟຟ້າ, ແລະອຸນຫະພູມຂອງແບັດເຕີຣີ. ໜ້າທີ່ພື້ນຖານທີ່ສຸດຂອງລະບົບການຈັດການແບັດເຕີຣີແມ່ນການວັດແທກແຮງດັນໄຟຟ້າ, ກະແສໄຟຟ້າ, ແລະອຸນຫະພູມຂອງເຊວແບັດເຕີຣີ, ເຊິ່ງເປັນພື້ນຖານຂອງການຄິດໄລ່ລະດັບສູງສຸດ ແລະເຫດຜົນການຄວບຄຸມທັງໝົດຂອງລະບົບການຈັດການແບັດເຕີຣີ.
(2) ການກວດຈັບຄວາມຕ້ານທານຂອງການສນວນ: ລະບົບແບັດເຕີຣີທັງໝົດ ແລະ ລະບົບແຮງດັນສູງ ຕ້ອງໄດ້ຮັບການທົດສອບການສນວນໂດຍລະບົບການຈັດການແບັດເຕີຣີ.
(3) ການກວດຈັບການເຊື່ອມຕໍ່ແຮງດັນສູງ (HVIL): ໃຊ້ເພື່ອຢືນຢັນຄວາມສົມບູນຂອງລະບົບແຮງດັນສູງທັງໝົດ. ເມື່ອຄວາມສົມບູນຂອງວົງຈອນລະບົບແຮງດັນສູງເສຍຫາຍ, ມາດຕະການຄວາມປອດໄພຈະຖືກເປີດໃຊ້ງານ.
ລຟັງຊັນການຄາດຄະເນ
(1) ການປະເມີນ SOC ແລະ SOH: ສ່ວນຫຼັກ ແລະ ສ່ວນທີ່ຍາກທີ່ສຸດ
(2) ການດຸ່ນດ່ຽງ: ປັບຄວາມບໍ່ສົມດຸນຂອງຄວາມຈຸ SOC x ລະຫວ່າງໂມໂນເມີຜ່ານວົງຈອນດຸ່ນດ່ຽງ.
(3) ຂໍ້ຈຳກັດພະລັງງານແບັດເຕີຣີ: ພະລັງງານເຂົ້າ ແລະ ພະລັງງານອອກຂອງແບັດເຕີຣີແມ່ນຖືກຈຳກັດຢູ່ທີ່ອຸນຫະພູມ SOC ທີ່ແຕກຕ່າງກັນ.
ລໜ້າທີ່ອື່ນໆ
(1) ການຄວບຄຸມຣີເລ: ລວມທັງຫຼັກ +, ຫຼັກ-, ຣີເລສາກໄຟ +, ຣີເລສາກໄຟ -, ຣີເລກ່ອນສາກໄຟ
(2) ການຄວບຄຸມຄວາມຮ້ອນ
(3) ໜ້າທີ່ການສື່ສານ
(4) ການວິນິດໄສຄວາມຜິດ ແລະ ສັນຍານເຕືອນໄພ
(5) ການດໍາເນີນງານທີ່ທົນທານຕໍ່ຄວາມຜິດພາດ
6.ສະຖາປັດຕະຍະກຳຊອບແວ BMS
ລການຄຸ້ມຄອງແຮງດັນສູງ ແລະ ຕ່ຳ
ເມື່ອເປີດເຄື່ອງຕາມປົກກະຕິ, BMS ຈະຖືກປຸກໂດຍ VCU ຜ່ານສັນຍານສາຍແຂງ ຫຼື ສັນຍານ CAN 12V. ຫຼັງຈາກ BMS ກວດສອບຕົນເອງສຳເລັດແລ້ວ ແລະ ເຂົ້າສູ່ໂໝດສະແຕນບາຍ, VCU ຈະສົ່ງຄຳສັ່ງແຮງດັນສູງ, ແລະ BMS ຈະຄວບຄຸມການປິດ relay ເພື່ອເຮັດການເຊື່ອມຕໍ່ແຮງດັນສູງໃຫ້ສຳເລັດ. ເມື່ອປິດເຄື່ອງ, VCU ຈະສົ່ງຄຳສັ່ງແຮງດັນຕ່ຳ ແລະ ຈາກນັ້ນຕັດການເຊື່ອມຕໍ່ການປຸກ 12V. ເມື່ອໃສ່ປືນເພື່ອສາກໄຟໃນສະຖານະປິດເຄື່ອງ, ມັນສາມາດປຸກໄດ້ໂດຍສັນຍານ CP ຫຼື A+.
ລການຈັດການການສາກໄຟ
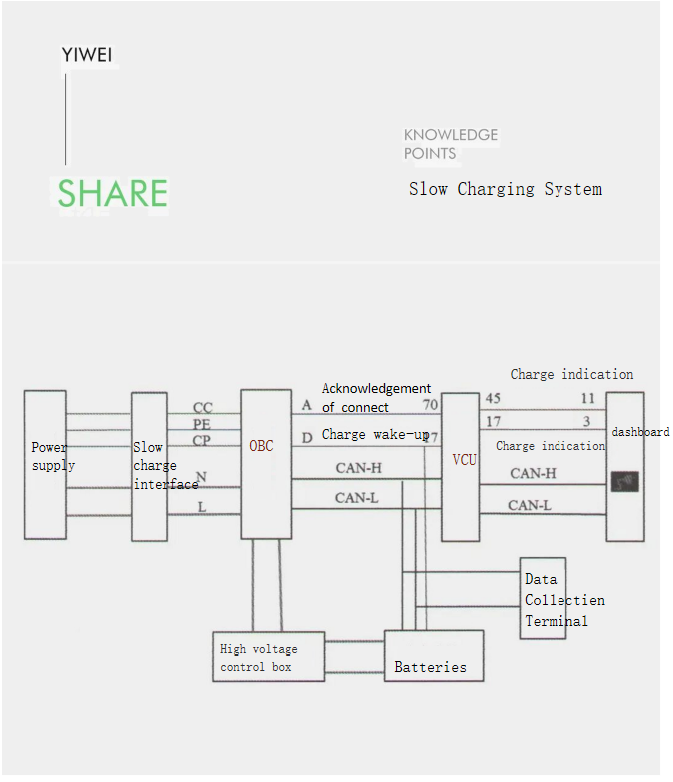
(1) ການສາກໄຟຊ້າ
ການສາກໄຟຊ້າແມ່ນການສາກແບັດເຕີຣີດ້ວຍກະແສໄຟຟ້າໂດຍກົງທີ່ປ່ຽນຈາກກະແສໄຟຟ້າສະຫຼັບໂດຍເຄື່ອງສາກໄຟໃນຕົວຂອງກອງສາກໄຟ (ຫຼື ແຫຼ່ງຈ່າຍໄຟ 220V). ລາຍລະອຽດຂອງກອງສາກໄຟໂດຍທົ່ວໄປແມ່ນ 16A, 32A, ແລະ 64A, ແລະມັນຍັງສາມາດສາກໄຟຜ່ານແຫຼ່ງຈ່າຍໄຟໃນຄົວເຮືອນໄດ້. BMS ສາມາດປຸກໄດ້ໂດຍສັນຍານ CC ຫຼື CP, ແຕ່ຄວນຮັບປະກັນວ່າມັນສາມາດນອນຫຼັບໄດ້ຕາມປົກກະຕິຫຼັງຈາກການສາກໄຟສຳເລັດ. ຂະບວນການສາກໄຟ AC ແມ່ນຂ້ອນຂ້າງງ່າຍດາຍ ແລະ ສາມາດພັດທະນາໄດ້ຕາມມາດຕະຖານແຫ່ງຊາດທີ່ລະອຽດ.
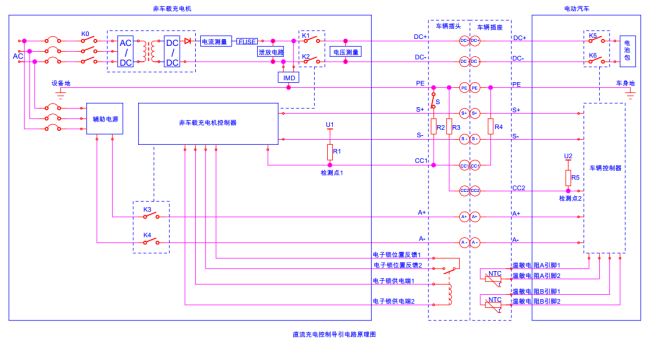
(2) ການສາກໄຟໄວ
ການສາກໄວແມ່ນການສາກແບັດເຕີຣີດ້ວຍກະແສໄຟຟ້າໂດຍກົງຈາກກອງສາກໄຟ DC ເຊິ່ງສາມາດບັນລຸອັດຕາການສາກໄຟໄດ້ 1C ຫຼືສູງກວ່າ. ໂດຍທົ່ວໄປ, ສາມາດສາກແບັດເຕີຣີໄດ້ 80% ພາຍໃນ 45 ນາທີ. ມັນສາມາດປຸກໄດ້ໂດຍສັນຍານແຫຼ່ງພະລັງງານເສີມ A+ ຂອງກອງສາກໄຟ.
ລຟັງຊັນການຄາດຄະເນ
(1) SOP (ສະຖານະພະລັງງານ) ສ່ວນໃຫຍ່ແມ່ນໄດ້ຮັບພະລັງງານໃນການສາກ ແລະ ປ່ອຍພະລັງງານທີ່ມີຢູ່ໃນປະຈຸບັນຂອງແບັດເຕີຣີໂດຍການຊອກຫາຕາຕະລາງຜ່ານອຸນຫະພູມ ແລະ SOC. VCU ກຳນົດວິທີການໃຊ້ຍານພາຫະນະທັງໝົດໂດຍອີງໃສ່ຄ່າພະລັງງານທີ່ສົ່ງ.
(2) SOH (ສະຖານະສຸຂະພາບ) ສ່ວນໃຫຍ່ແມ່ນສະແດງເຖິງສະຖານະພາບສຸຂະພາບໃນປະຈຸບັນຂອງແບັດເຕີຣີ, ໂດຍມີຄ່າລະຫວ່າງ 0-100%. ໂດຍທົ່ວໄປແລ້ວຖືວ່າແບັດເຕີຣີບໍ່ສາມາດໃຊ້ໄດ້ຫຼັງຈາກມັນຫຼຸດລົງຕໍ່າກວ່າ 80%.
(3) SOC (ສະຖານະປະຈຸໄຟຟ້າ) ເປັນຂອງອັລກໍຣິທຶມຄວບຄຸມຫຼັກຂອງ BMS, ເຊິ່ງສະແດງລັກສະນະສະຖານະພາບຄວາມຈຸທີ່ຍັງເຫຼືອໃນປະຈຸບັນ. ມັນສ່ວນໃຫຍ່ແມ່ນອີງໃສ່ວິທີການປະສົມປະສານແອມແປ-ຊົ່ວໂມງ ແລະ ອັລກໍຣິທຶມ EKF (ຕົວກອງ Kalman ແບບຂະຫຍາຍ), ປະສົມປະສານກັບຍຸດທະສາດການແກ້ໄຂ (ເຊັ່ນ: ການແກ້ໄຂແຮງດັນວົງຈອນເປີດ, ການແກ້ໄຂປະຈຸໄຟຟ້າເຕັມ, ການແກ້ໄຂການສິ້ນສຸດປະຈຸໄຟຟ້າ, ການແກ້ໄຂຄວາມຈຸພາຍໃຕ້ອຸນຫະພູມທີ່ແຕກຕ່າງກັນ ແລະ SOH, ແລະອື່ນໆ).
(4) ອັລກໍຣິທຶມ SOE (ສະຖານະພະລັງງານ) ບໍ່ໄດ້ຖືກພັດທະນາຢ່າງກວ້າງຂວາງໂດຍຜູ້ຜະລິດພາຍໃນປະເທດ ຫຼື ໃຊ້ອັລກໍຣິທຶມທີ່ຂ້ອນຂ້າງງ່າຍດາຍເພື່ອໃຫ້ໄດ້ອັດຕາສ່ວນຂອງພະລັງງານທີ່ເຫຼືອຢູ່ພາຍໃຕ້ສະຖານະປັດຈຸບັນຕໍ່ພະລັງງານສູງສຸດທີ່ມີຢູ່. ຟັງຊັນນີ້ສ່ວນໃຫຍ່ແມ່ນໃຊ້ເພື່ອປະເມີນລະດັບການລ່ອງເຮືອທີ່ຍັງເຫຼືອ.
ລການວິນິດໄສຄວາມຜິດພາດ
ລະດັບຄວາມຜິດປົກກະຕິທີ່ແຕກຕ່າງກັນແມ່ນແຍກແຍະຕາມປະສິດທິພາບທີ່ແຕກຕ່າງກັນຂອງແບັດເຕີຣີ, ແລະມາດຕະການປະມວນຜົນທີ່ແຕກຕ່າງກັນແມ່ນດໍາເນີນໂດຍ BMS ແລະ VCU ພາຍໃຕ້ລະດັບຄວາມຜິດປົກກະຕິທີ່ແຕກຕ່າງກັນ, ເຊັ່ນ: ການເຕືອນ, ການຈໍາກັດພະລັງງານ, ຫຼືການຕັດການເຊື່ອມຕໍ່ໂດຍກົງຂອງແຮງດັນສູງ. ຄວາມຜິດປົກກະຕິປະກອບມີຄວາມຜິດປົກກະຕິຂອງການຮັບຂໍ້ມູນ ແລະ ເຫດຜົນ, ຄວາມຜິດປົກກະຕິທາງໄຟຟ້າ (ເຊັນເຊີ ແລະ ຕົວກະຕຸ້ນ), ຄວາມຜິດປົກກະຕິດ້ານການສື່ສານ, ແລະ ຄວາມຜິດປົກກະຕິຂອງສະຖານະແບັດເຕີຣີ, ແລະອື່ນໆ.
1.ໜ້າທີ່ຊອບແວຫຼັກຂອງ BMS
ລຟັງຊັນການວັດແທກ
(1) ການວັດແທກຂໍ້ມູນພື້ນຖານ: ການຕິດຕາມແຮງດັນໄຟຟ້າຂອງແບັດເຕີຣີ, ສັນຍານກະແສໄຟຟ້າ, ແລະອຸນຫະພູມຂອງແບັດເຕີຣີ. ໜ້າທີ່ພື້ນຖານທີ່ສຸດຂອງລະບົບການຈັດການແບັດເຕີຣີແມ່ນການວັດແທກແຮງດັນໄຟຟ້າ, ກະແສໄຟຟ້າ, ແລະອຸນຫະພູມຂອງເຊວແບັດເຕີຣີ, ເຊິ່ງເປັນພື້ນຖານຂອງການຄິດໄລ່ລະດັບສູງສຸດ ແລະເຫດຜົນການຄວບຄຸມທັງໝົດຂອງລະບົບການຈັດການແບັດເຕີຣີ.
(2) ການກວດຈັບຄວາມຕ້ານທານຂອງການສນວນ: ລະບົບແບັດເຕີຣີທັງໝົດ ແລະ ລະບົບແຮງດັນສູງ ຕ້ອງໄດ້ຮັບການທົດສອບການສນວນໂດຍລະບົບການຈັດການແບັດເຕີຣີ.
(3) ການກວດຈັບການເຊື່ອມຕໍ່ແຮງດັນສູງ (HVIL): ໃຊ້ເພື່ອຢືນຢັນຄວາມສົມບູນຂອງລະບົບແຮງດັນສູງທັງໝົດ. ເມື່ອຄວາມສົມບູນຂອງວົງຈອນລະບົບແຮງດັນສູງເສຍຫາຍ, ມາດຕະການຄວາມປອດໄພຈະຖືກເປີດໃຊ້ງານ.
ລຟັງຊັນການຄາດຄະເນ
(1) ການປະເມີນ SOC ແລະ SOH: ສ່ວນຫຼັກ ແລະ ສ່ວນທີ່ຍາກທີ່ສຸດ
(2) ການດຸ່ນດ່ຽງ: ປັບຄວາມບໍ່ສົມດຸນຂອງຄວາມຈຸ SOC x ລະຫວ່າງໂມໂນເມີຜ່ານວົງຈອນດຸ່ນດ່ຽງ.
(3) ຂໍ້ຈຳກັດພະລັງງານແບັດເຕີຣີ: ພະລັງງານເຂົ້າ ແລະ ພະລັງງານອອກຂອງແບັດເຕີຣີແມ່ນຖືກຈຳກັດຢູ່ທີ່ອຸນຫະພູມ SOC ທີ່ແຕກຕ່າງກັນ.
ລໜ້າທີ່ອື່ນໆ
(1) ການຄວບຄຸມຣີເລ: ລວມທັງຫຼັກ +, ຫຼັກ-, ຣີເລສາກໄຟ +, ຣີເລສາກໄຟ -, ຣີເລກ່ອນສາກໄຟ
(2) ການຄວບຄຸມຄວາມຮ້ອນ
(3) ໜ້າທີ່ການສື່ສານ
(4) ການວິນິດໄສຄວາມຜິດ ແລະ ສັນຍານເຕືອນໄພ
(5) ການດໍາເນີນງານທີ່ທົນທານຕໍ່ຄວາມຜິດພາດ
2.ສະຖາປັດຕະຍະກຳຊອບແວ BMS
ລການຄຸ້ມຄອງແຮງດັນສູງ ແລະ ຕ່ຳ
ເມື່ອເປີດເຄື່ອງຕາມປົກກະຕິ, BMS ຈະຖືກປຸກໂດຍ VCU ຜ່ານສັນຍານສາຍແຂງ ຫຼື ສັນຍານ CAN 12V. ຫຼັງຈາກ BMS ກວດສອບຕົນເອງສຳເລັດແລ້ວ ແລະ ເຂົ້າສູ່ໂໝດສະແຕນບາຍ, VCU ຈະສົ່ງຄຳສັ່ງແຮງດັນສູງ, ແລະ BMS ຈະຄວບຄຸມການປິດ relay ເພື່ອເຮັດການເຊື່ອມຕໍ່ແຮງດັນສູງໃຫ້ສຳເລັດ. ເມື່ອປິດເຄື່ອງ, VCU ຈະສົ່ງຄຳສັ່ງແຮງດັນຕ່ຳ ແລະ ຈາກນັ້ນຕັດການເຊື່ອມຕໍ່ການປຸກ 12V. ເມື່ອໃສ່ປືນເພື່ອສາກໄຟໃນສະຖານະປິດເຄື່ອງ, ມັນສາມາດປຸກໄດ້ໂດຍສັນຍານ CP ຫຼື A+.
ລການຈັດການການສາກໄຟ
(1) ການສາກໄຟຊ້າ
ການສາກໄຟຊ້າແມ່ນການສາກແບັດເຕີຣີດ້ວຍກະແສໄຟຟ້າໂດຍກົງທີ່ປ່ຽນຈາກກະແສໄຟຟ້າສະຫຼັບໂດຍເຄື່ອງສາກໄຟໃນຕົວຂອງກອງສາກໄຟ (ຫຼື ແຫຼ່ງຈ່າຍໄຟ 220V). ລາຍລະອຽດຂອງກອງສາກໄຟໂດຍທົ່ວໄປແມ່ນ 16A, 32A, ແລະ 64A, ແລະມັນຍັງສາມາດສາກໄຟຜ່ານແຫຼ່ງຈ່າຍໄຟໃນຄົວເຮືອນໄດ້. BMS ສາມາດປຸກໄດ້ໂດຍສັນຍານ CC ຫຼື CP, ແຕ່ຄວນຮັບປະກັນວ່າມັນສາມາດນອນຫຼັບໄດ້ຕາມປົກກະຕິຫຼັງຈາກການສາກໄຟສຳເລັດ. ຂະບວນການສາກໄຟ AC ແມ່ນຂ້ອນຂ້າງງ່າຍດາຍ ແລະ ສາມາດພັດທະນາໄດ້ຕາມມາດຕະຖານແຫ່ງຊາດທີ່ລະອຽດ.
(2) ການສາກໄຟໄວ
ການສາກໄວແມ່ນການສາກແບັດເຕີຣີດ້ວຍກະແສໄຟຟ້າໂດຍກົງຈາກກອງສາກໄຟ DC ເຊິ່ງສາມາດບັນລຸອັດຕາການສາກໄຟໄດ້ 1C ຫຼືສູງກວ່າ. ໂດຍທົ່ວໄປ, ສາມາດສາກແບັດເຕີຣີໄດ້ 80% ພາຍໃນ 45 ນາທີ. ມັນສາມາດປຸກໄດ້ໂດຍສັນຍານແຫຼ່ງພະລັງງານເສີມ A+ ຂອງກອງສາກໄຟ.
ລຟັງຊັນການຄາດຄະເນ
(1) SOP (ສະຖານະພະລັງງານ) ສ່ວນໃຫຍ່ແມ່ນໄດ້ຮັບພະລັງງານໃນການສາກ ແລະ ປ່ອຍພະລັງງານທີ່ມີຢູ່ໃນປະຈຸບັນຂອງແບັດເຕີຣີໂດຍການຊອກຫາຕາຕະລາງຜ່ານອຸນຫະພູມ ແລະ SOC. VCU ກຳນົດວິທີການໃຊ້ຍານພາຫະນະທັງໝົດໂດຍອີງໃສ່ຄ່າພະລັງງານທີ່ສົ່ງ.
(2) SOH (ສະຖານະສຸຂະພາບ) ສ່ວນໃຫຍ່ແມ່ນສະແດງເຖິງສະຖານະພາບສຸຂະພາບໃນປະຈຸບັນຂອງແບັດເຕີຣີ, ໂດຍມີຄ່າລະຫວ່າງ 0-100%. ໂດຍທົ່ວໄປແລ້ວຖືວ່າແບັດເຕີຣີບໍ່ສາມາດໃຊ້ໄດ້ຫຼັງຈາກມັນຫຼຸດລົງຕໍ່າກວ່າ 80%.
(3) SOC (ສະຖານະປະຈຸໄຟຟ້າ) ເປັນຂອງອັລກໍຣິທຶມຄວບຄຸມຫຼັກຂອງ BMS, ເຊິ່ງສະແດງລັກສະນະສະຖານະພາບຄວາມຈຸທີ່ຍັງເຫຼືອໃນປະຈຸບັນ. ມັນສ່ວນໃຫຍ່ແມ່ນອີງໃສ່ວິທີການປະສົມປະສານແອມແປ-ຊົ່ວໂມງ ແລະ ອັລກໍຣິທຶມ EKF (ຕົວກອງ Kalman ແບບຂະຫຍາຍ), ປະສົມປະສານກັບຍຸດທະສາດການແກ້ໄຂ (ເຊັ່ນ: ການແກ້ໄຂແຮງດັນວົງຈອນເປີດ, ການແກ້ໄຂປະຈຸໄຟຟ້າເຕັມ, ການແກ້ໄຂການສິ້ນສຸດປະຈຸໄຟຟ້າ, ການແກ້ໄຂຄວາມຈຸພາຍໃຕ້ອຸນຫະພູມທີ່ແຕກຕ່າງກັນ ແລະ SOH, ແລະອື່ນໆ).
(4) ອັລກໍຣິທຶມ SOE (ສະຖານະພະລັງງານ) ບໍ່ໄດ້ຖືກພັດທະນາຢ່າງກວ້າງຂວາງໂດຍຜູ້ຜະລິດພາຍໃນປະເທດ ຫຼື ໃຊ້ອັລກໍຣິທຶມທີ່ຂ້ອນຂ້າງງ່າຍດາຍເພື່ອໃຫ້ໄດ້ອັດຕາສ່ວນຂອງພະລັງງານທີ່ເຫຼືອຢູ່ພາຍໃຕ້ສະຖານະປັດຈຸບັນຕໍ່ພະລັງງານສູງສຸດທີ່ມີຢູ່. ຟັງຊັນນີ້ສ່ວນໃຫຍ່ແມ່ນໃຊ້ເພື່ອປະເມີນລະດັບການລ່ອງເຮືອທີ່ຍັງເຫຼືອ.
ລການວິນິດໄສຄວາມຜິດພາດ
ລະດັບຄວາມຜິດປົກກະຕິທີ່ແຕກຕ່າງກັນແມ່ນແຍກແຍະຕາມປະສິດທິພາບທີ່ແຕກຕ່າງກັນຂອງແບັດເຕີຣີ, ແລະມາດຕະການປະມວນຜົນທີ່ແຕກຕ່າງກັນແມ່ນດໍາເນີນໂດຍ BMS ແລະ VCU ພາຍໃຕ້ລະດັບຄວາມຜິດປົກກະຕິທີ່ແຕກຕ່າງກັນ, ເຊັ່ນ: ການເຕືອນ, ການຈໍາກັດພະລັງງານ, ຫຼືການຕັດການເຊື່ອມຕໍ່ໂດຍກົງຂອງແຮງດັນສູງ. ຄວາມຜິດປົກກະຕິປະກອບມີຄວາມຜິດປົກກະຕິຂອງການຮັບຂໍ້ມູນ ແລະ ເຫດຜົນ, ຄວາມຜິດປົກກະຕິທາງໄຟຟ້າ (ເຊັນເຊີ ແລະ ຕົວກະຕຸ້ນ), ຄວາມຜິດປົກກະຕິດ້ານການສື່ສານ, ແລະ ຄວາມຜິດປົກກະຕິຂອງສະຖານະແບັດເຕີຣີ, ແລະອື່ນໆ.
ຕິດຕໍ່ພວກເຮົາ:
yanjing@1vtruck.com +(86)13921093681
duanqianyun@1vtruck.com +(86)13060058315
liyan@1vtruck.com +(86)18200390258
ເວລາໂພສ: ພຶດສະພາ-12-2023



